
CAN Configuration
CAN Controller (Init/Info)
")
CAN - Send message

CAN - Receive message

All CAN controllers can individually be parametrized regarding bitrate and node number over this configuration dialog.
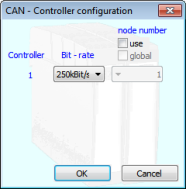

The dialog can be called over the tools menu or the “CAN” symbol in the toolbar (far right).
Controller Status
The status of the controller is output bit-coded. To access each bit, a converter and a bit vector have to be used.
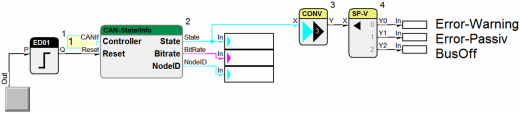
| Value | Meaning |
|---|---|
| Bit 0 | EWG: „Error warning“ 1 = counter for receive or send error>= 96 0 = counter for receive and send error<= 95 |
| Bit 1 | EPV:„Error passive“ 1 = counter for receive or send error> 127 0 =counter for receive and send error<= 127 |
| Bit 2 | BOFF:„Bus-off“ 1 = counter for send error> 255 0 = counter for send error ≤ 255 |